湖南蓝天智能装备科技有限公司

湖南蓝天智能装备科技有限公司
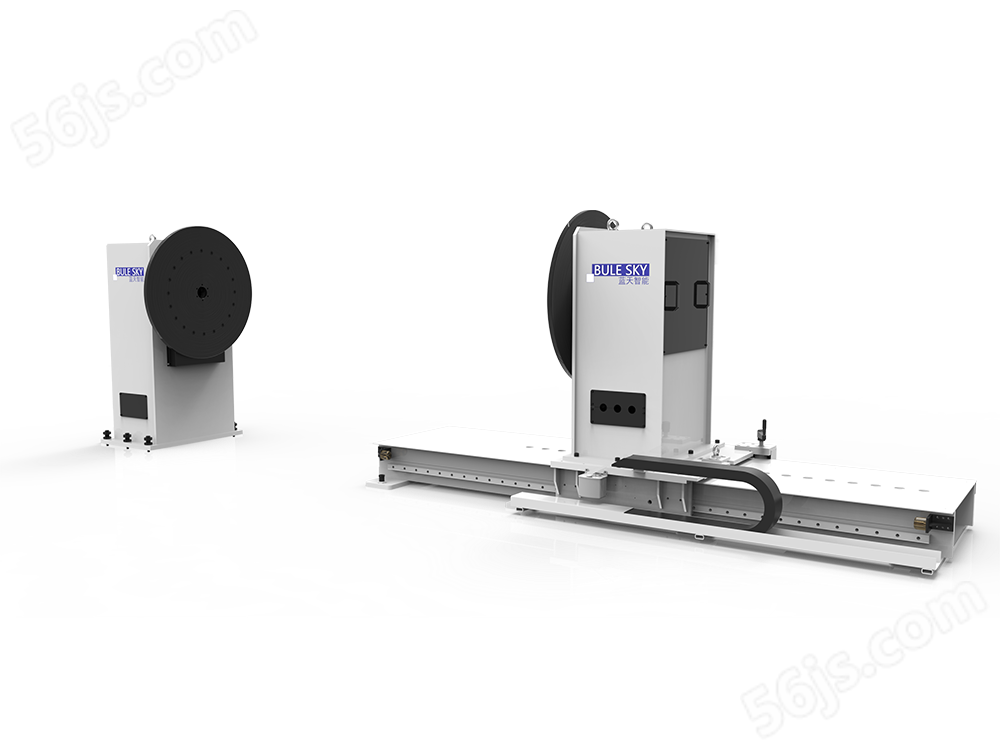
移动头尾架单轴变位机
✧ 产品简介
变位机的翻转运动为伺服电机,与机器人系统进行轨迹插补,变位机基座采用优质型材及钢板焊接而成,经过退火处理再机械精加工。减速机采用高精度RV减速机,翻转轴可与机器人协调达到焊接姿态。
导电机构安装在主动回转座内,导电铜块在弹簧作用下保证焊接过程中导电良好。
工装夹具装配在翻转减速机输出法兰的安装架上。
六轴机器人和翻转变位机配合使用,使得该机器人工作系统有的工作范围和柔性,即使大型复杂工件上可达性不好的空间焊缝,也可轻松胜任!
✧ 快速详细信息
1、高精密减速机
2、回转精度高,定位准确
3、承载能力强
4、可根据工件的长度,移动尾架,柔性生产
5、采用RV系类精密减速机
6、尾架移动行程1~4米
7、翻转范围±180°
✧ 产品参数
| 型号 | YB005 | YB010 | YB025 | YB050 | YB100 |
| 负载(T) | 0.5 | 1 | 2.5 | 5 | 10 |
| 尾架移动行程(m) | 1月4日 | 1月4日 | 1月4日 | 1月4日 | 1月4日 |
| 翻转范围(°) | ±180 | ±180 | ±180 | ±180 | ±180 |
| 平移精度(mm) | ±0.05 | ±0.05 | ±0.05 | ±0.1 | ±0.1 |
| 旋转精度(mm) | ±0.1 | ±0.1 | ±0.1 | ±0.2 | ±0.2 |
| 重复定位精度(“) | ±0.05 | ±0.05 | ±0.05 | ±0.1 | ±0.1 |
| 平移速度(m/min) | 60 | 60 | 60 | 30 | 30 |
| 翻转速度(r/min) | ≈3 | ≈3 | ≈3 | ≈2 | ≈1.5 |
| 适配电机 | FANUC、KUKA、ABB、YASKAWA等伺服 | ||||
✧ 注意事项
1、操作者必须熟悉设备的一般结构和性能,严禁超性能使用设备;
2、工作前操作者应穿戴好各种劳保用品,以确保工作安全;
3、严禁移动或损坏安装在机床上的警告标牌、铭板;
4、工作完毕后,需将所有的开关以及装置恢复到初始位置;
5、冬季使用设备时,必须在空载运行5分钟后再工作;
6、在对设备进行机械维修前,必须切断设备总电源,严禁带电维修;
7、吊装工件不得有大幅度的摆动,防止工件撞坏夹具;
8、工件落在夹具上时,要轻放,禁止对夹具及变位机有过大的冲击
您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN


物流技术网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码