
搬运机器人
 |
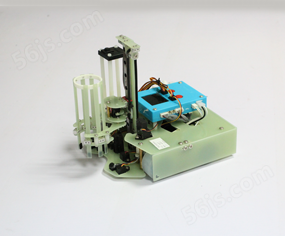
产品参数
处理器:双核,两片32位STM32系列控制芯片,基于Cortex TM-M4内核、哈怫总线结构,主频 168MHZ,1MFLASH,192KRAM,X主板专用操作系统;
主板端口:14路高速模拟输入口,6路高速数字输入输出口,2+1路电机驱动口, USART专用总线接口,程序选择拨盘,USB通讯端口,通用串口总线,IIC接口,1路声音,1路电源检测等;
编程软件:具有BRD软件著作权的开发系统,Buddy竞赛机器人专用BRD系统,可提供流程图编程、C代码编程、Basic代码多种编程环境,三种编程环境之间可以相互切换并自动生成相应代码;
驱动系统:2路独立驱动的大功率电机卡,2个双轴输出电机,4个防滑轮胎(直径46mm);
传感器模块:10路地面灰度传感器(可识别各种标准搬运场地中颜色);数字指南针;1路红外测距传感器;1路红外测障传感器;1套高精度颜色识别装置;1套机械搬运装置;
电源模块: 1组12V高倍率锂电池、1个短路保护模块;
配置清单
序号 | 名称 | 单位 | 数量 |
1 | 机器人控制板_KMon | 套 | 1 |
2 | 伺服电机_SR3 | 只 | 1 |
3 | 伺服电机_12g | 只 | 1 |
4 | 双轴输出电机I_S6_B2 | 只 | 2 |
5 | ADC转接卡_8L | 个 | 1 |
6 | 竞赛专用轮胎_46型 | 只 | 4 |
7 | 锂电池3S_2.2_3476 | 组 | 1 |
8 | 红外测障传感器_单段 | 个 | 1 |
9 | 红外测距传感器_80型 | 个 | 1 |
10 | 地面灰度传感器I_W | 个 | 10 |
11 | 地面灰度传感器_W | 个 | 1 |
12 | 地面灰度传感器_G | 个 | 1 |


