

GLS-C30-A是基于ToF原理开发的红外环境雷达。特别优化的避障模式,可以设置相应的感兴趣探测区域,并通过CANBUS 传输最近距离点的单点投影距离息。相对于单线扫描式雷达来说,没有任何的旋转部件保证长时间运行的可靠性,并且可以得到更广的探测范围。
主要特点
纯固态雷达
面阵探测
超过 120°大角度水平探测视场
9°垂直探测视场
可设置感兴趣探测区域的避障模式
雷达内部计算最近点,CANBUS/TCP 输出单点值
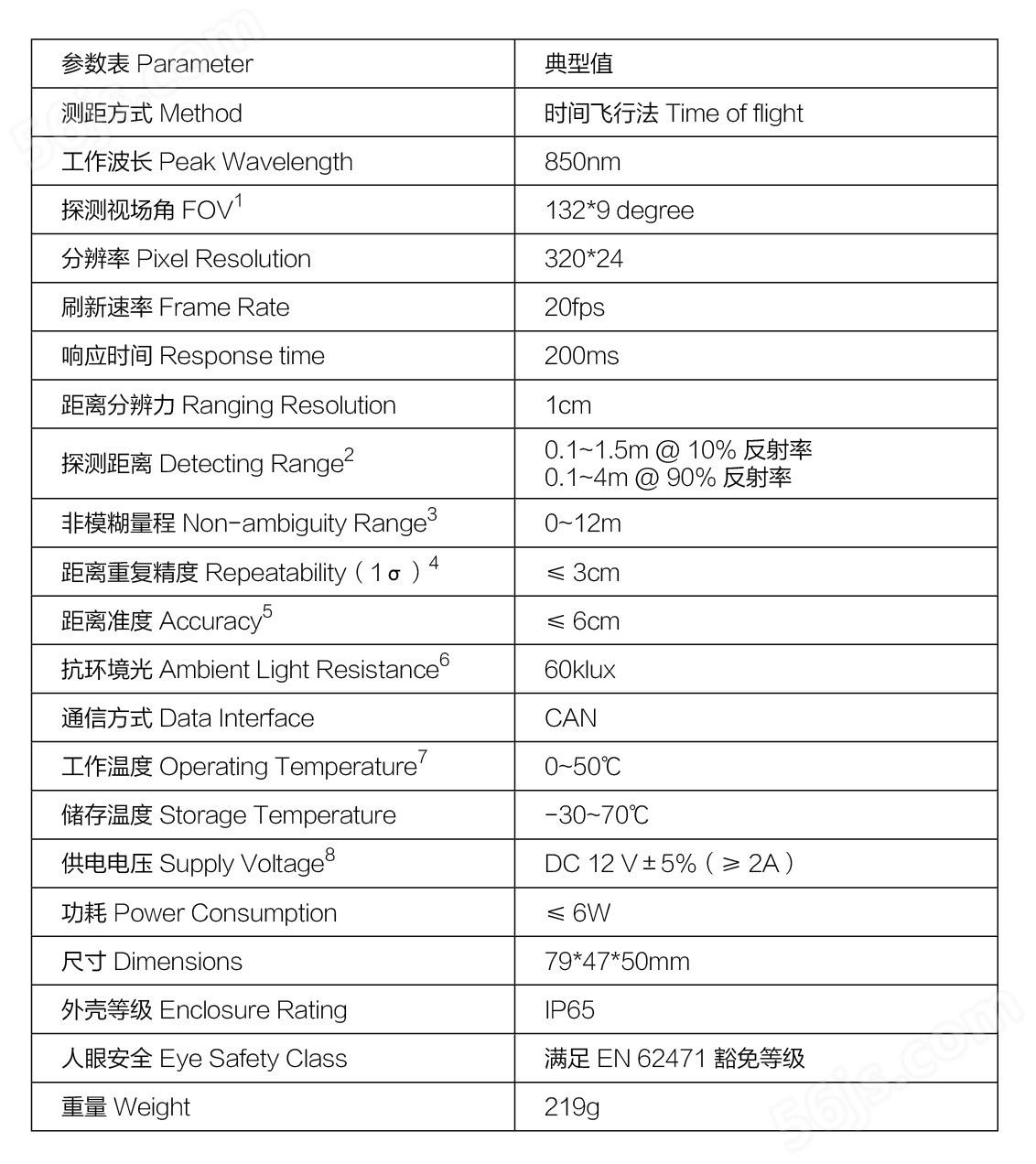
技术参数
GLS-C30-A是基于ToF原理开发的红外环境雷达。特别优化的避障模式,可以设置相应的感兴趣探测区域,并通过CANBUS 传输最近距离点的单点投影距离息。相对于单线扫描式雷达来说,没有任何的旋转部件保证长时间运行的可靠性,并且可以得到更广的探测范围。
主要特点
纯固态雷达
面阵探测
超过 120°大角度水平探测视场
9°垂直探测视场
可设置感兴趣探测区域的避障模式
雷达内部计算最近点,CANBUS/TCP 输出单点值
技术参数


