


CX/powertwo荧光激光雷达系统科研使用场景:
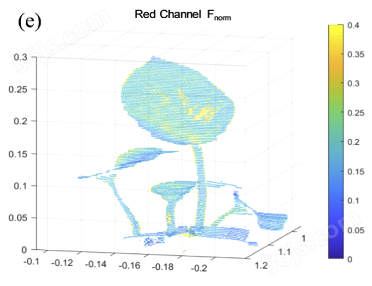
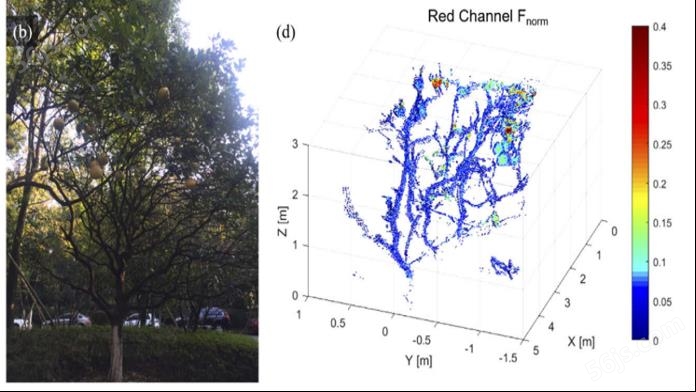
1)植物表型探测:荧光激光雷达可以获得三维荧光点云,从而在获得植物形状结构参数的同时,通过多光谱荧光数据获得特征组份与生理参数的三维空间分布。
2)枝叶分割:传统的枝叶分割基于点云的空间位置与强度,需要匹配负责的算法,鲁棒性不强。由于枝叶的叶绿素含量相差较大,而荧光多光谱点云与叶绿素荧光正相关,因而通过荧光点云可以很容易的实现枝叶分离,且结果稳定可靠。
3)地上生物量计算:在使用激光雷达进行地上生物量检测时,需要排除树叶点云的影响。荧光激光雷达可以准确地排除树叶点云,不需要人工剪除树叶,实现了生物量的无损检测。
4)胁迫探测:各种胁迫下叶绿素的荧光响应一直是植物表型领域的研究热点。荧光激光雷达可以获取各点的多通道荧光强度,并可以定制程序实现定时自动扫描记录,为胁迫探测提供高通量解决方案。
5)叶绿素分布探测:本荧光激光雷达实现的多通道荧光,可以定性得到叶绿素浓度相对分布,并可通过标定获得准确浓度分布的测量。
6)叶面积指数探测:在枝叶分离的基础上,通过对点云数据的计算与叠加,实现准确叶面积指数的探测。
教学使用场景:
1)形态结构测量教学:在林业资源调查中,传统植物形态结构测量需要通过人工方式,使用卷尺等传统工具测量植株的高度、胸径、地上生物量等参数。对于较高的林木,往往需要使用胸径乘以一定系数进行估算,因而会引入误差;对于地上生物量的测量,需要对植物进行破快性测量,在教学时只能对测量过程进行描述。荧光激光雷达可以获得林木的荧光点云。通过对点云的处理,可以获得不同高度的胸径、植株的高度。对生物量进行测量时,可以引入枝叶分割算法,通过点云的多光谱荧光特性方便的将树叶点云去除,留下枝干点云进行计算最终得到体积。教学过程包括多点数据采集、降噪、点云匹配、枝叶分离、数据拟合、计算等过程,培养学生动手实验能力与数据处理能力。
2)胁迫荧光检测探索教学:叶绿素荧光是一种常见的植物表型检测方式。通过叶绿素荧光的变化可以探索植物在缺水、缺氮、缺光照等胁迫条件下的反应,从而建立表型与胁迫预测模型。本系统可以同时获取点云信息与荧光信息,可作为学生探索植物不同因素胁迫时的检测工具,应用于一些胁迫反应的验证与新胁迫反应的探索。
系统特点:
1)同时获取三维点云与RGB三通道荧光点云;
2)采用推扫式结构,单次对一个平面进行探测,角分辨率较128线激光雷达可以高1个数量级;
系统指标:
指标 | 参数 |
激光波长 | 405nm/450nm/520nm可选 |
激光功率 | 405nm不小于400mW;450nm/520nm不小于1W;功率可调 |
扫描方式 | 推扫式旋转扫描 |
扫描范围 | 水平角≥45度,俯仰角≥70度,精确测量范围0~10米(可按需求定制); |
扫描精度 | 2米处精度≤1cm |
光谱通道数 | RGB 3通道 |
扫描速率 | 多档速度可调 |
供电电压 | 12VDC/220VAC可选 |
系统体积 | 不大于30*30*30cm(不包括支架) |